
These days, ocean plastic is one of the better understood environmental issues amongst the wider public. Images of giant floating garbage patches and animals stricken by everyday non-biodegradable waste have spurred some public action and resulted in significant ambitious projects. The Ocean Cleanup project for example, aims to clean the ocean surface with massive floating barriers.
However, this only impacts one part of ocean plastic – the waste floating on the surface. As much as 70 percent of ocean plastic may actually sink down to the seabed, where it becomes entangled with plant life, coral and rock formations. Once stuck here, it is much harder to reach and remove.
To solve this issue, roboticists at the Max Planck Institute for Intelligent Systems in Stuttgart took some advice from the real oceanic experts – nature itself. They have developed a jellyfish-like robot which can navigate complex environments and remove smaller plastic waste without even having to touch it.
The robot, produced in collaboration with the Physical Intelligence and Robotic Materials departments at the Max Planck Institute, consists of electrohydraulic actuators which can mimic the muscles and movement of jellyfish. These liquid-filled artificial muscles, known as HASELs, are embedded into a series of polymer layers which also function as skin for the robot. When a voltage is passed across electrodes embedded in the HASELs, liquid inside is pushed back and forth, contracting and relaxing the HASEL much like a real muscle. This creates a motion which allows the Jellyfish-Bot to navigate its surroundings, move vertically and horizontally.
This not only provides propulsion, but also creates a current under the Jellyfish-Bot which delicately draws up objects from the seabed. Real jellyfish use this to trap nutrients, but the same principles can be applied to lifting out smaller plastic waste. The team envisions the Jellyfish-Bot carrying plastic waste up to the surface where it is captured and recycled.
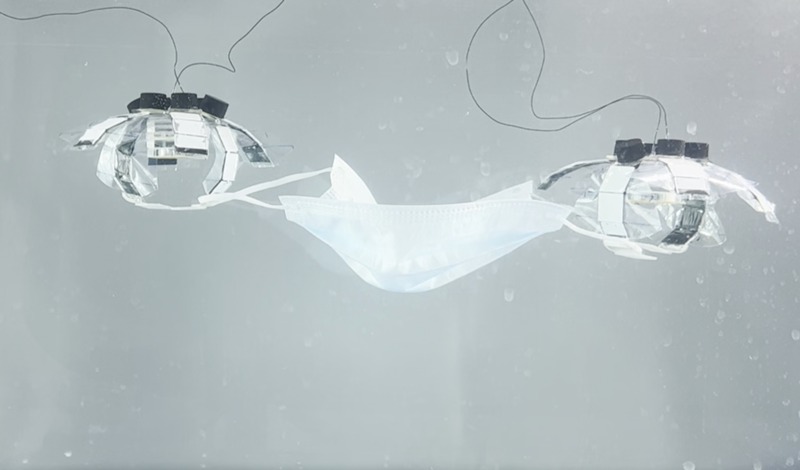
For larger pieces of waste, the ‘arms’ of the Jellyfish-Bot can also be used for grasping and carrying. The developers are even experimenting with teams of Jellyfish-Bots which can collaborate to carry heavier or more complex pieces of waste.
This is not the first time robotics have been used to tackle the issue of underwater waste, but the Max Planck team suggest their approach has significant advantages over others. Firstly, their robot is not large, cumbersome or rigid – as with other robotic aquatic vehicles – allowing it to get in and amongst more complex geography and ecosystems. Furthermore, by doing away with propellers and other traditional forms of underwater propulsion, the Jellyfish-Bot is also considerably quieter than alternatives. The team claims that its noise is not distinguishable from the background sounds of the ocean, reducing its impact on marine wildlife.
The polymer which protects the robot is also safe to humans and fish if pierced, and the low current used in the Jellyfish-Bot also poses little risk. The ability for the Jellyfish-Bot to collect objects without touching them also means it may have other roles to play. For example, it could collect delicate fish eggs or other biological samples for environmental and biodiversity monitoring.
However, the team does accept that in its current form it does suffer from one significant downside. Currently, it is powered and controlled by a wire attached to an operator, which significantly impacts its range and practicality in real natural settings. The developers are currently experimenting with wireless control and powering, and have already developed a model which can swim vertically without the need for wires.







